

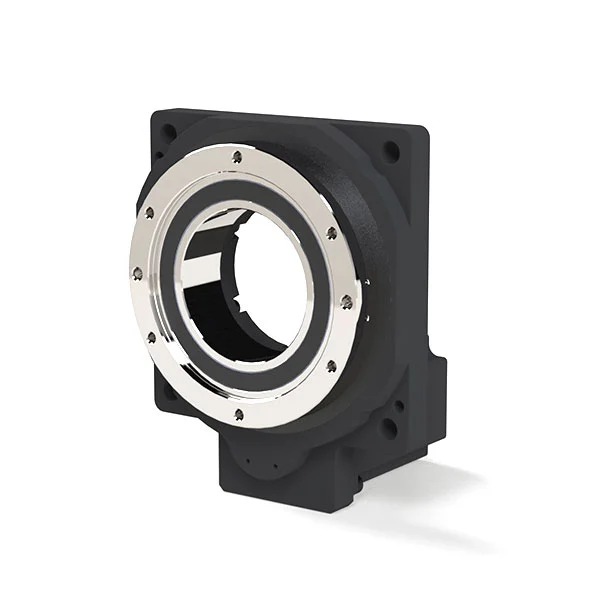

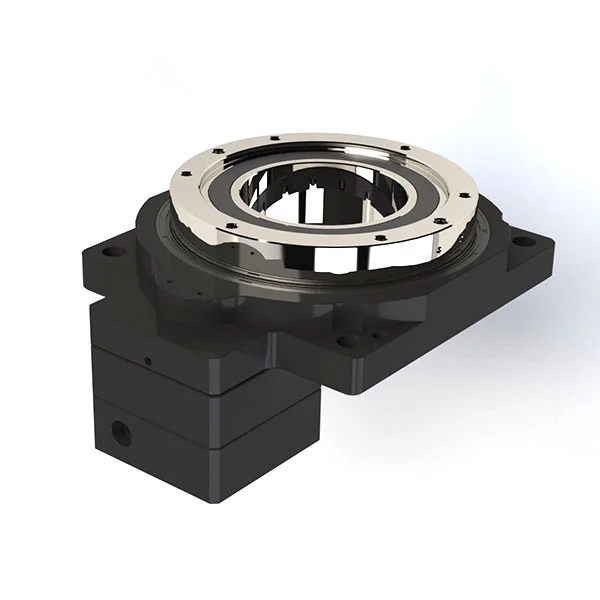



La plataforma rotativa hueca utiliza una estructura de engranajes de alta precisión y cojinetes radiales para mejorar el par y la rigidez, lo que permite un rodamiento de carga más estable. Cuando se combina con un servomotor o un motor paso a paso, puede realizar una división de ángulo arbitraria. No solo cumple con el control de dígitos que los indexadores no pueden lograr, sino que también tiene una precisión de posicionamiento comparable a la de los motores de accionamiento directo, y puede lograr el posicionamiento de las cargas inerciales en un corto período de tiempo.
Instrucciones de instalación para la plataforma rotativa hueca
 Primero, confirme si el motor coincide con la plataforma y elimina la materia extraña en la superficie. |
② Retire los tornillos de extremo plano de la brida de transición y gire el extremo de entrada para ajustar la posición hasta que se puedan ver los pernos de fijación del anillo de bloqueo. |
③ Alinee el eje del motor con el extremo de entrada del reductor, insértelo en el reductor y prepiline los pernos de conexión en diagonal. |
 Apriete el anillo de bloqueo y apriete los pernos; Consulte la tabla a continuación para ver el par. |
⑤ Use una llave de par para apretar los tornillos de fijación diagonalmente. Consulte la tabla de torque a continuación para ver el par. |
⑥ Apriete el tornillo de extremo plano. |
Instalación de la manga del eje

Puntos de selección de la plataforma rotativa hueca
Cálculo de carga/inercia del objeto a transportar (JW)
La inercia del objeto a transportar debe ser menos de 30 veces mayor que la del dispositivo de transmisión como estándar.
Extremo de salida
■ Cálculo del par de aceleración (TA)
Consulte la siguiente fórmula:
Torque de aceleración t [n · m] = (jm + jw) * π/30 * (n₂ - n₁)/t₁)
donde jm: inercia del motor [kg · m²]; JA: inercia del mecanismo [kg · m²]; JW: inercia de la carga [kg · m²]; N₂: velocidad de funcionamiento [r/min]; N₁: velocidad de inicio [r/min]; T₁: Tiempo de aceleración (desaceleración) [s].
■ Cálculo del par requerido
El par requerido se calcula multiplicando la suma del par de carga causado por la impedancia de fricción y el par de aceleración causado por la inercia por un factor de seguridad.
Torque requerido T = (Torque de carga [N · M] + Torque de aceleración [N · M]) × Factor de seguridad = (TL + Ta) × S. El factor de seguridad S es mayor que 1.5.
■ Selección de motor
El par requerido del motor debe estar dentro del rango de especificaciones del torque de velocidad.
Curva característica de velocidad de velocidad del motor de paso.
DIRECCIÓN
No. 148 Aldea Dongfeng, distrito de Xiaoshan, ciudad de Hangzhou, provincia de Zhejiang, China
Teléfono
Correo electrónico














